
Southern California - Inland Empire - San Bernardino
Robotics and Technology Club
Photos - Reference Links - Notes
First up are photos of our robots and other projects. Click on an image to see the notes about photo.

Black 3Pi: This robot is a Black PCB, Pololu 3Pi with Black wheels. I called it Stealth at first but people kept asking me “Which Robot is Stealth?” PHMIII

Servo Line-Follower: This robot was designed and built to specifically compete in line-following competitions where only servos are allowed as drive motors. The Servo class was created because Servo driven Robots are “Too Slow” to compete with the “Other” robots. Processing power supplied by an Arduino, PHMIII

BOE-Bot Clone: I took a Robotics class at El Camino College where they used the Parallax BOE-Bot as the robot platform. I missed the original BOE-Bot so much that I built this Clone using a Parallax Sumo-Bot control board so that I could continue on with Parallax’s online Education program: processing power supplied by a Basic Stamp II. PHMIII

CD Wall-follower: The CD Wall-follower was designed and built for the Jameco Coaster Bot II Robot Design Contest. In the Jameco Coaster Bot Design Contest all Robots must be constructed primarily with old discarded CDs: processing power supplied by a SparkFun RedBoard. PHMIII
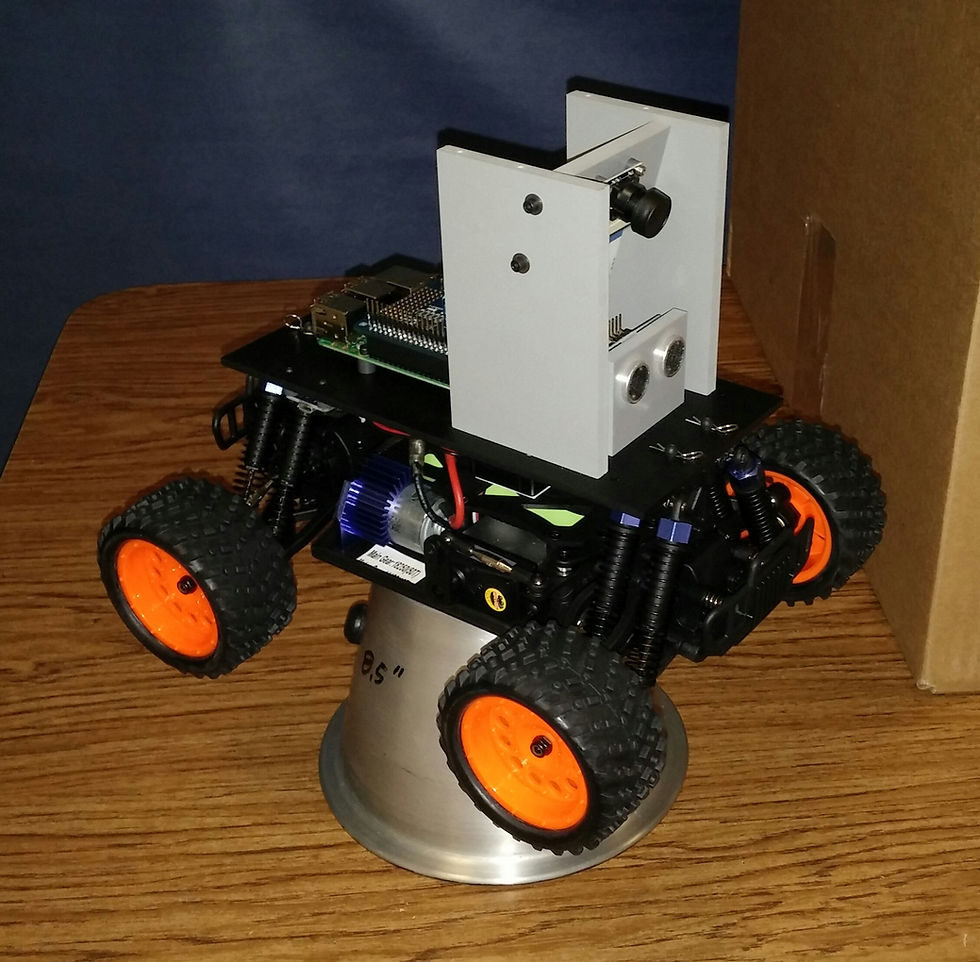
DIY Donkey Car: This is a recipe Robot to compete in the DIY RoboCars Tenth Scale Autonomous Car Class. The upper chassis was built from ABS and PVC sheet because a 3D printer was not available. PHMIII

iRobot ATRV-mini: This iRobot ATRV-mini was built by iRobot back in 2002 before Endeavor Robotics existed. I saw it on eBay and “Had” to buy it! It is worse than owning an Antique Car. No support is available from iRobot or Endeavor Robotics: no parts, no software, no nothing! This Robot is a mess of Antiques: it has a Pentium II processor with 500Kb of Ram. PHMIII

Mark II Line-follower: The Mark II was designed and built for the DIY gearhead line-following class. The processing power is supplied by a Pololu Orangutan SV-328 Robot Controller and a QTR-8RC Reflectance Sensor Array. PHMIII

We didn't build this! But we do use it for inspiration.

Zumo Robot Kit designed to be line follower,sumo or balancing(as Pictured.)